Hallo Allemaal,
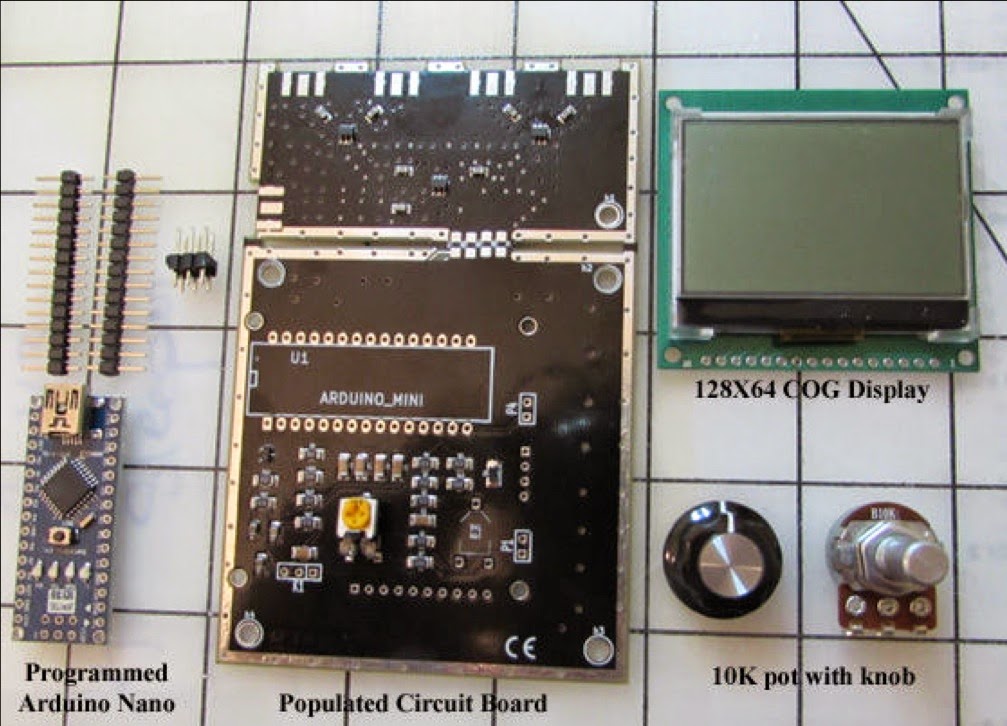
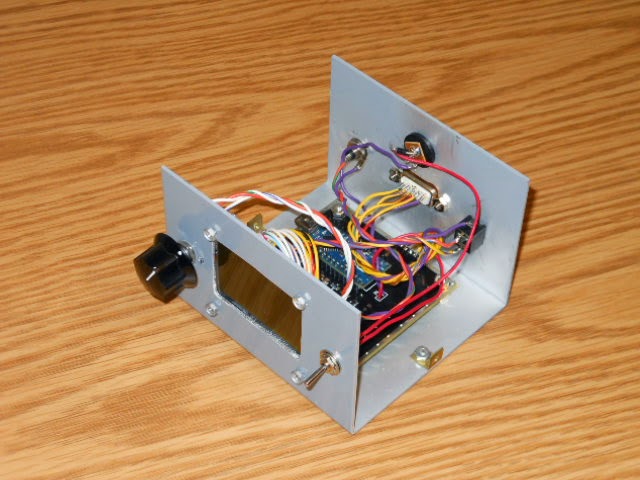
Alvast een idee voor wat er allemaal op het arduino shield zou moeten komen.
Voor de audio input naar de 4 c's
zit er een discharge transistor op.
Misschien niet nodig als je ervan uitgaat
dat als je alle 4 de c's aan massa legt en effe wacht
dan zullen de c's vanzelf naar 1/2 U gaan
ondanks data er wat audio uit de speaker op staan (PAFYM Hint)
Maar goed nu zit er dus een extra rapide discharge(1/2U) transistor bij op...
ook de de verbeterde uitgebreide Arduino Sketch.
Nog niet getest en gebouwd alles hi...
Maar dat gaat wel komen binnenkort
Code: Selecteer alles
/*
((C))PA3BNX
Trying to create a SuperSimpleArduinoDoppler on Arduino Uno R3
@12-04-2015
@13-05-2015
@15-05-2015
@17-05-2015
No Calibration throug serialPort yet
No CW/CCW through serialPort yet
Not ready yet!
*/
//Byte= 0 >255
//Int= -32768>32767
//Const Integer
//Antenna Control Pins & refpa3bnx
const byte antPin[] = {2,3,4,5}; //Set antenna control pins pins
const byte refpa3bnx = 6; //Pin for Referency frequency output to soundcard
//Kwadrant Capicity switches & analogue SCF read pin
const byte kPin[] = {7,8,9,10,11}; //4 pins caps 4u7 Last Pin in array = Discharge
const byte kPinAnalog = 0; //A0 read voltage acros 1 4u7 pin 0 to 5
const int offset = 511; //.5 * 1023 caps offset
//Signals
const byte sqlclosed = 0;
const byte sqlclosed2open = 1;
const byte sqlopen2closed = 2;
const byte sqloverflow = 3; //Capicitors are full
//
const int cNodegrees = 999; //Squelch No Signal or sqlopenclosed
//MaxMinValues
const int MaxAveragedCount = 100; //Average to only last Degrees in Average()
const int MaxAudioAmplitude = 511; //Max (Voltage?) analoge value
const int MinAudioAmplitude = 100; //There is signal to SinCosDetect
//Float const
const float pi = 4 * atan(1);
//const float rad = pi/180;
const float rad1 = 180/pi;
//const float TwoPi = 2 * pi;
//Bool
boolean bMultiPath = false;
//Array with the 4 kwandrant tensions
int Cap[] = {0,0,0,0};
//Integer
int KwartDopplerPerioduSec = 8000; // 4/500 = 0.008 Sec @ 500 Hz
unsigned long StartTimer;
unsigned long MaxTime ;
byte Quality = 0; //Not used yet
byte sqlstatus = sqlclosed;
//---------Functions now-------------------
//Antenna Control Lines Just counts 1234 1234 etc
void SetAntPins(byte t){
static byte tt;
//Do never set twice the same pins states
if (t != tt){
switch (t){
case 0:
digitalWrite(antPin[1], HIGH);
digitalWrite(antPin[4], LOW);
digitalWrite(refpa3bnx,HIGH);
tt=t;
break;
case 1:
digitalWrite(antPin[2], HIGH);
digitalWrite(antPin[1], LOW);
tt=t;
break;
case 2:
digitalWrite(antPin[3], HIGH);
digitalWrite(antPin[2], LOW);
digitalWrite(refpa3bnx,LOW);
tt=t;
break;
case 3:
digitalWrite(antPin[4], HIGH);
digitalWrite(antPin[3], LOW);
tt=t;
break;
}
}
}
//Get 4 Cap Value's in Cap[]
void GetCapValues(){
for (byte i=0; i<4; i++)
{
digitalWrite(kPin[i],LOW);
}
digitalWrite(kPin[1],HIGH);
Cap[1] = analogRead(kPinAnalog)-offset;
digitalWrite(kPin[1],LOW);
digitalWrite(kPin[2],HIGH);
Cap[2] = analogRead(kPinAnalog)-offset;
digitalWrite(kPin[2],LOW);
digitalWrite(kPin[3],HIGH);
Cap[3] = analogRead(kPinAnalog)-offset;
digitalWrite(kPin[3],LOW);
digitalWrite(kPin[4],HIGH);
Cap[4] = analogRead(kPinAnalog)-offset;
digitalWrite(kPin[4],LOW);
}
//Empty the 4 capicitors by discharging to 1/2 U
void EmptyCaps(){
for (byte i=0; i<4; i++)
{
pinMode(kPin[i],LOW);
delay(200); //mSec's
}
digitalWrite(kPin[5],HIGH);
delay(2000); //Let the 4 caps charge to 1/2 U to 99% 5 * (22k * (4,7uF * 4)) 2068 Sec
digitalWrite(kPin[5],LOW);
}
//-------------Squelch-----------------------
int Squelch(){
//Returns the sqlstatus
//Try Find a full cap
int x;
//Find cap with most tension
for(byte i=0; i<4; i++)
{
if abs((Cap[i]) >= MaxAudioAmplitude )
{
x = abs(Cap[i]);
}
}
//See if there is a Full Cap
if (x >= MaxAudioAmplitude)
{
return sqloverflow;
//Caps are full so need emptied
}
else if (x >= MinAudioAmplitude)
{
return sqlclosed2open;
}
else if (x < MinAudioAmplitude)
{
return sqlclosed;
}
}
//Return Agrelo formatted string % and 3 digits always
char* Format3Degrees(int degrees){
int digits[3];
int reminder ;
digits[1]=degrees/100;
reminder = degrees % 100;
digits[2]= reminder/10;
reminder = reminder % 10;
digits[3]=reminder;
char str[4] = {'%','digit[1]','digit[2]','digit[3]'};
return str;
}
//Limit Degrees 0 to 360 degrees
int LimitDegrees360(int d){
//Limit degrees 0 to 360 here
if (d >= 360){
return d - 360;
}
else if (d < 360)
{
return d;
}
else if (d < 0)
{
return 360 + d;
}
else
{
return cNodegrees;
}
}
//Average
int Average(int d){
//If d = 999 (cNoDegrees) then reset average
//Else return averaged degrees
//Integer
static int sum[4];
static int c[4];
int xx[4] ={0,0,0,0};
int z = 0;
int z1 = 0;
int y = 0;
int avDegrees;
//Limit amount off averaged headings
if (c[1]+c[2]+c[3]+c[4] > MaxAveragedCount){
for (byte i = 0; i < 4 ; i++){
sum[i]=0;
c[i]=0;
return cNodegrees;
}
}
if (d!=cNodegrees){
if (d >= 0 && d < 90){
sum[1] += d;
c[1]++;
}
if (d >= 90 && d < 180){
sum[2] += d;
c[2]++;
}
if (d >= 180 && d < 270){
sum[3] += d;
c[3]++;
}
if (d >= 270 && d <= 360){
sum[4] += d;
c[4]++;
}
}
else
{
//Reset
for (byte i=0; i<4; i++){
sum[i]=0;
c[i]=0;
bMultiPath = false;
}
return cNodegrees;
}
//Find 2 adjacent kwadrants with hold most counts
//Count all adjacents kwadrants
xx[1] = c[1]+c[2];
xx[2] = c[2]+c[3];
xx[3] = c[3]+c[4];
xx[4] = c[4]+c[1];
//Find out in witch two kwadrants the most headings are
for (byte i=0; i<4; i++){
if (xx[i] >= z){
z = xx[i]; //Most Headings
y = i; //Witch Array Index
}
}
//Check for multipath
switch(z){
case 1:
z1 = 3;
break;
case 2:
z1 = 4;
break;
case 3:
z1 = 1;
break;
case 4:
z1 = 2;
break;
}
if (z > z1){
bMultiPath = true;
}
else
{
bMultiPath = false;
}
//Average the 2 most counts kwadrants
switch(y){
case 1:
avDegrees = (sum[1] + sum[2]) / c[y];
break;
case 2:
avDegrees = (sum[2] + sum[3]) / c[y];
break;
case 3:
avDegrees = (sum[3] + sum[4]) / c[y];
break;
case 4:
if (c[4] == 0 && c[1] > 0){
avDegrees = sum[1] / c[1];
break;
}
if (c[4] > 0 && c[1] == 0){
avDegrees = sum[4] / c[4];
break;
}
if (c[4] > 0 && c[1] > 0 ){
avDegrees = LimitDegrees360(((sum[4] / c[4]) + ((sum[1] / c[1]) + 360) / 2));
break;
}
}
if (d == cNodegrees){
return avDegrees;
}
}
//SinCosDetector Find the degrees from the 4 Cap[] tensions
int SinCosDetector(){
int SinSum;
int CosSum;
int x;
//In Cap[] is the tension value of 1 of the 4 C'S
SinSum = Cap[1] - Cap[3];
CosSum = Cap[2] - Cap[4];
if (SinSum == 0 && CosSum == 0){
return cNodegrees;
}
return LimitDegrees360(atan2(SinSum,CosSum) * rad1);
}
//------------------------------------Main Functions-----------------------------------------
//SetUp
void setup()
{
// Loop over the pin array and set them all to output:
Serial.begin(4800); // Opens serial port, sets data rate to 4800 bps
Serial.println("((C))PA3BNX Arduino Doppler");
pinMode(refpa3bnx,OUTPUT);
pinMode(kPinAnalog, INPUT);
pinMode(refpa3bnx,OUTPUT);
pinMode( kPinAnalog,INPUT); //Okay here ????
pinMode(kPin[5],OUTPUT);//Discharge Pin
for (byte i=0; i<4; i++){
pinMode(kPin[i],OUTPUT);
pinMode(antPin[i] ,OUTPUT);
digitalWrite(kPin[i],LOW); //Set Cap pins to low so the can charge to 1/2U
}
SetAntPins(4); //Set antPins to LOW
Average(cNodegrees); //Reset all to 0
EmptyCaps; //All kPins to 1/2 U
MaxTime = KwartDopplerPerioduSec * 4 * 1000000 * 15; //15 Secondes max before EmtyCaps
StartTimer = micros()+ KwartDopplerPerioduSec;
}
//Main Loop
void loop() {
// ToDo
//GetCapValues
// Set the ant1,2,3,4 and refpa3bnx pins
// Squelch status
// OverFlow Reset the 4 kwadrant capicitors
// SinCosDetector
// Send (averaged) and calibrated degrees out through serialport
// Set c microseconds
//Integer
byte c;
unsigned long t;
if (c == 3) {
c = -1;
}
GetCapValues();
SetAntPins(c);
sqlstatus = Squelch();
if (sqlstatus == sqloverflow || (t >= MaxTime))
{
t = 0;
EmptyCaps();
}
else
{
//Relaxed sending to comport
if (sqlstatus == sqlopen2closed && bMultiPath == false)
{
Serial.println(Format3Degrees(Average(SinCosDetector())));
sqlstatus = sqlclosed;
}
}
//What ToDo if overflow ? This micros() number will overflow (go back to zero), after approximately 70 minutes
if (micros()>=(StartTimer)){
c++;//AntPin Counter
t++;//Total rotations counter TimeMax has uSec for 15 Sec's
StartTimer = micros()+ KwartDopplerPerioduSec;
}
}
//End of sketch